 采埃孚展出的线控转向组件,包括 SBW手轮执行器、集成 CD 转向装置和燃料电池压缩机等。(采埃孚)
采埃孚展出的线控转向组件,包括 SBW手轮执行器、集成 CD 转向装置和燃料电池压缩机等。(采埃孚)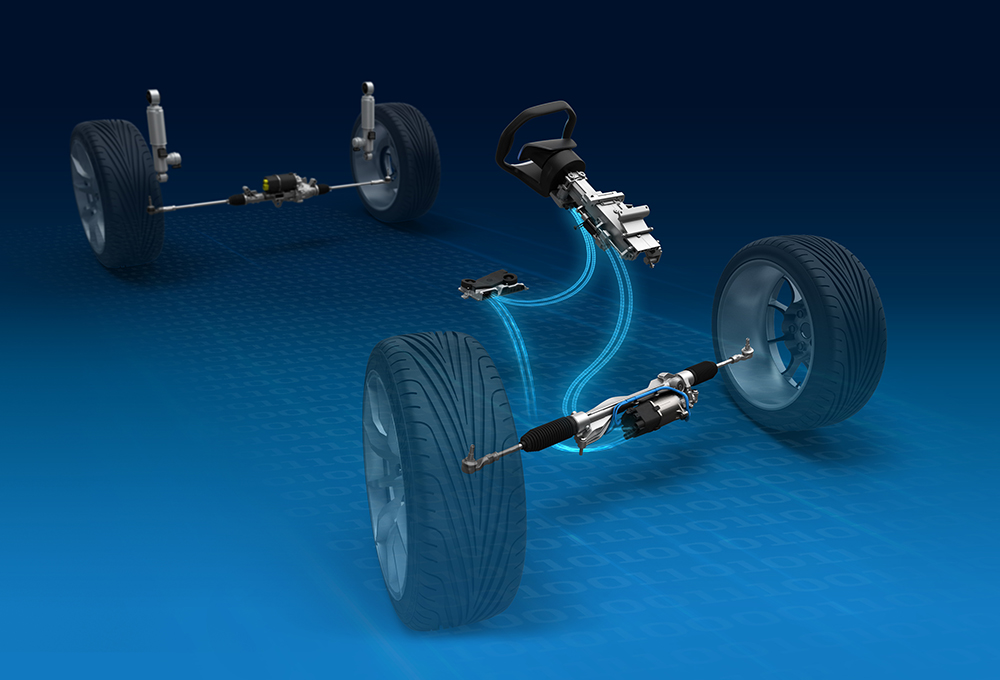 采埃孚认为,正如其cubiX软件平台和底盘2.0概念所展示的那样,一台高性能中央计算机就能控制线控转向系统和所有其他驾驶动态功能。(采埃孚)
采埃孚认为,正如其cubiX软件平台和底盘2.0概念所展示的那样,一台高性能中央计算机就能控制线控转向系统和所有其他驾驶动态功能。(采埃孚) 采埃孚改装了一辆大众 ID.3,在短距离测试道路道上展示其线控转向系统。(采埃孚)
采埃孚改装了一辆大众 ID.3,在短距离测试道路道上展示其线控转向系统。(采埃孚) 采埃孚线控转向产品组合总监 Jake Morris(采埃孚)
采埃孚线控转向产品组合总监 Jake Morris(采埃孚) 采埃孚电磁设计团队负责人 Harvey Smith(采埃孚)
采埃孚电磁设计团队负责人 Harvey Smith(采埃孚)
基于“无依赖(system-agnostic)”概念打造的这一系统可以整合来自其他供应商的组件和系统。
未来底盘会是什么样的?这是采埃孚在最近于其英国研发中心举办的活动上提出的问题。该中心专注于控制技术、材料、机电一体化、软件、系统集成、嵌入式电子和电力电子系统的研发。
和其他汽车领域一样,底盘也将不可避免地适应新兴趋势,如电气化、软件定义汽车、自动驾驶和新型电气架构。不过,未来的底盘动力学仍然需要处理车辆的侧倾、偏转和俯仰等问题。为了整合需求,如L5级自动驾驶以及包括驾驶员参与的所有阶段,采埃孚设想了一个同时适用于内燃机和电驱系统的系统,该系统基于一个底盘控制器打造,比如在2022年末在Lotus Eletre上首次亮相的cubiX系统。cubiX的设计采用了“system agnostic”概念,因此可以整合来自其他供应商的组件和系统。
cubiX系统并没有对转向、制动、侧倾控制或扭矩矢量等方面进行单独优化,而是将所有功能集成至一个中央系统,以实现各车载系统的交互,并使其能够利用来自云端的外部输入信号,从而实现提高乘客舒适度和底盘性能、以及优化运行状况、减少维修成本等多种效益。不仅如此,它还可以用来控制主动阻尼系统、主动稳定杆和后轮转向等多个系统。
采埃孚在一条较短的操控测试路线上,利用改装版大众ID.3演示了线控转向系统的功能。在这次演示中,ID.3的前轴上不再配备方向盘、转向柱和转向机,而是只在前桥上配备了一个方向盘(或手轮)。采埃孚线控转向产品组合总监 Jake Morris表示,“线控转向系统可通过小幅度转动方向盘,实现车轮的较大幅度转动。凭借该系统,在更高级别的自动驾驶汽车中,你可以改装方向盘或移动其位置;在L4级及以上的自动驾驶汽车中,甚至可能移除方向盘。不过,在大型车辆中,可能需要将该系统与两个不同的动力装置与后轮转向配合使用。”
ID.3演示车保留了方向盘,而且采埃孚为其设置了三种转向模式:模拟标准机械转向模式、自动适应车速的转向比模式,以及提供180度左右转向角的“轭式转向(steering yoke)”模式。
他指出,“我个人认为, AI机器人或许可以很好地完成90%的工作,从而找到满足性能要求的拓扑结构。AI机器人能通过经验和模式匹配,分析其数据库中大量不同的电机拓扑结构和尺寸数据,然后据此推荐有关电机极数、槽数和绕组线圈类型的信息,这些信息可帮助你以80%的准确度选择符合要求的电机。当超出AI力所能及的范围时,最后的微调工作或许会采用更传统的技术。”
What can we expect from the chassis of the future? That was the question posed by ZF at a recent event staged at its UK Hub, a center for R&D into control, materials, mechatronics, software, system integration, embedded electronics and power electronics.
Inevitably, chassis will adapt to emerging trends such as electrification, software defined vehicles, autonomous driving, and new electrical architectures. Chassis dynamics will still need to deal with vehicle roll, yaw and pitch. To integrate future requirements such as autonomy at Level 5, and all stages including with a driver, using either an internal combustion engine or electric drive, ZF envisages a system based around a chassis controller such as its cubiX system, first seen on the Lotus Eletre in late 2022. CubiX is designed to be system agnostic, so can integrate components and systems from other suppliers.
Instead of further optimizing the individual dimensions of steering, braking, roll control or torque vectoring, CubiX integrates all features in a central system, enabling interaction between various on-board systems, while also factoring in external inputs from the cloud. The results from this could be wide ranging, from improved passenger comfort and chassis performance to optimization of operational and warranty costs. Systems such as active damping, active stabilizer bars and rear-wheel steering could all be handled by such a system.
ZF provided a demonstration of steer-by-wire systems on a short maneuvering course, using a modified Volkswagen ID.3. In place of a steering wheel, column, and rack, the ID.3 was equipped with just a steering, or hand, wheel on the front axle. “Potentially, you’re now having fewer rotations of the steering wheel, compared to the movement of the steered wheels”, said Jake Morris, ZF’s portfolio director for steer-by-wire products. “Then in higher levels of autonomous driving, that also allows you to change or move the steering wheel, or retract it away from the driver potentially in autonomous levels 4 and above. For larger vehicles, you may need two different power units driving it in combination with rear steer.”
The demonstration ID.3 retained its steering wheel and ZF had set it up with three steering modes, including a simulation of standard mechanical steering and one with an adaptive ratio that changed with vehicle speed. The third used a “steering yoke” mode offering just 180 degrees of rotation to left or right.
The adaptive ratio provided greater front wheel movements from relatively small steering wheel inputs, making parking, and reversing simpler as they required less wheel movement. At higher speeds, steering wheel movement and steered wheel movement was closer to what one might expect from a conventional, mechanical system. The yoke mode was a natural progression from this, offering easy maneuvering at low speeds and more conventional movements at higher speeds. Both modes were easy to adapt to, which ZF says has been the case in tests carried out so far.
AI in Design
Harvey Smith is ZF’s team leader in electro-magnetic design and has wide-ranging responsibilities for magnetic materials and components from motors to sensors to solenoid actuators. While simulation has been part of the design process used for many years, there’s more AI can offer, he said. “As electromagnetic design engineers, we live and breathe the simulations because it really tells us something. As we’re able to advance our simulation tools, we can couple this into more and more things,” Smith said. “Can we literally ask an AI bot to assign regions of magnet steel and copper and then manipulate those regions in infinite combinations until they come up with a topology that gives us what we want? How would that work versus the more traditional approach where you take traditional topologies, parameterize all the dimensions and ask your AI bot to learn which combination of parameters give you the result that is most likely what you want?
“I’m thinking, in my own mind that AI could perhaps do a really good job of getting 90% of the way there to do this job, for these performance requirements. The AI bot can have learned through experience and pattern matching, it can look at its large bank of different machine topologies and dimensions and say, ‘What you probably want is this many poles, this many slots, these kinds of windings. These sorts of things to get 80% towards selecting good options for machines that match these requirements.’ The jury is out, but it might be that you then do the last bits of refinement using the more traditional techniques.”
等级
打分
- 2分
- 4分
- 6分
- 8分
- 10分
平均分
- 作者:John Kendall
- 行业:汽车
- 主题:管理与产品开发车辆与性能车辆底盘与飞机起落架